目录
Linux 内核中有大量的函数需要时间管理,比如周期性的调度程序、延时程序、对于驱动编写者来说最常用的就是定时器。硬件定时器提供时钟源,时钟源的频率可以设置, 设置好以后就周期性的产生定时中断,系统使用定时中断来计时。中断周期性产生的频率就是系统频率,也叫做节拍率(tick rate)(有的资料也叫系统频率)。
Liunx系统的节拍率可以在编译Linux内核的时候通过图形化界面设置。路径如下:通过make configuration命令可以进行图形化配置。
-> Kernel Features
-> Timer frequency ( [=y])
如图所示可以选配的节拍率有100Hz、200Hz等等。Linux系统默认使用100Hz。选择高系统节拍率的优点和缺点:
①高节拍率会提高系统时间精度,如果采用 100Hz 的节拍率,时间精度就是 10ms,采用
1000Hz 的话时间精度就是 1ms,精度提高了 10 倍。高精度时钟的好处有很多,对于那些对时
间要求严格的函数来说linux 内核定时器,能够以更高的精度运行,时间测量也更加准确。
②高节拍率会导致中断的产生更加频繁,频繁的中断会加剧系统的负担, 1000Hz 和 100Hz
的系统节拍率相比,系统要花费 10 倍的“精力”去处理中断。中断服务函数占用处理器的时间增加。
Linux 内核使用全局变量 jiffies 来记录系统从启动以来的系统节拍数,系统启动的时候会
将 jiffies 初始化为 0,jiffies 定义在文件 include/linux/jiffies.h 中linux vi命令,定义如下:
extern u64 __jiffy_data jiffies_64;
extern unsigned long volatile __jiffy_data jiffies;其中jiffies_64用于64为系统,jiffies用于32位系统。为了硬件的兼容性他们的关系如下:

其实读取jiffies变量也就是读取jiffies_64的低32位。jiffies表示系统运行的节拍数,而系统每过1s就会增加设置的节拍数,因此系统运行时间就是jiffies/节拍数。Linux提供了以下几个函数来判断绕回:

time_after:当unkown超过known的时候函数返回值为真。 timer_before:当unkown未超过known的时候函数返回值为真。
timer_after_eq(unkown,known):当unkown等于known的时候函数返回值为真。
timer_before_eq(unkown,known):当unkown不等于known的时候函数返回值为真。
比如要判断某段代码运行时间有没有超过2s,代码如下:
unsigned long timeout;
timeout = jiffies + (2 * HZ); /* 超时的时间点 */
/*************************************
具体的代码
************************************/
/* 判断有没有超时 */
if(time_before(jiffies, timeout)) {
/* 超时未发生 */
}
else {
/* 超时发生 */
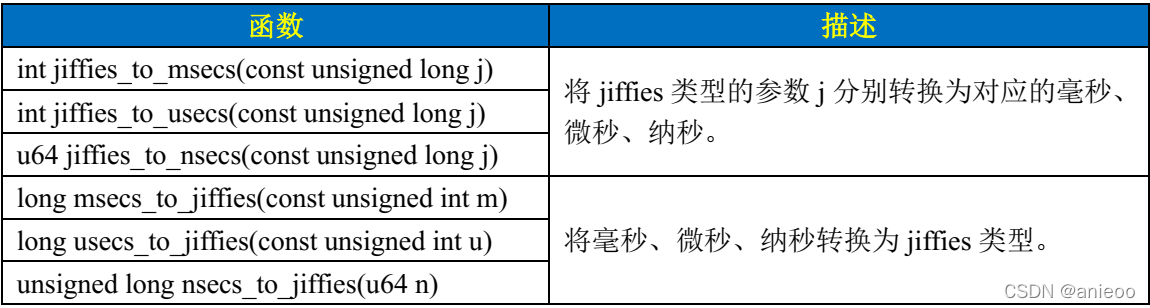
}timeout 就是超时时间点等于jiffies + 2*HZ。如果 jiffies 大于 timeout 那就表示超时了,否则就是没有超时。同时为了方便驱动开发,Linux提供了jiffies和 ms、us等转换函数:
一、内核定时器
Linux 内核定时器采用系统时钟来实现,与硬件定时器功能一样,当超时时间到了以后设
置的定时处理函数就会执行。内核定时器不需要一大堆寄存器的配置工作,并且内核定时器执行完超时处理函数以后就会自动关闭。若需要周期运行,则需要在处理函数中再次打开内核定时器。
内核定时器和硬件定时器共同点:
① 超时时间到了以后linux 内核定时器,会执行处理函数
不同点:
① 内核定时器不需要配置寄存器,硬件定时器需要配置对应寄存器。
② 内核定时器只执行一次处理函数,若需要周期执行,需要在处理函数中再次打开。硬件定时器会周期执行处理函数。
Linux 内核使用 timer_list 结构体表示内核定时器, timer_list 定义在文件include/linux/timer.h 中,定义如下:
struct timer_list {
struct list_head entry;
unsigned long expires; /* 定时器超时时间,单位是节拍数 */
struct tvec_base *base;
void (*function)(unsigned long); /* 定时处理函数 */
unsigned long data; /* 要传递给 function 函数的参数 */
int slack;
};要使用内核定时器首先要先定义一个 timer_list 变量,表示定时器, tiemr_list 结构体的expires 成员变量表示超时时间,单位为节拍数。
二、内核定时器API函数 1、init_timer 函数
void init_timer(struct timer_list *timer)
函数参数和返回值含义如下:
timer:要初始化定时器。
返回值: 没有返回值
init_timer 函数负责初始化 timer_list 类型变量,当定义完timer_list结构体以后,需要使用此函数进行初始化。
2、add_timer 函数
void add_timer(struct timer_list *timer)
函数参数和返回值含义如下:
timer:要注册的定时器。
返回值: 没有返回值。
add_timer 函数用于向 Linux 内核注册定时器linux系统下载官网,使用 add_timer 函数向内核注册定时器以后,
定时器就会开始运行。
3、del_timer 函数
int del_timer(struct timer_list * timer)
函数参数和返回值含义如下:
timer:要删除的定时器。
返回值: 0,定时器还没被激活; 1,定时器已经激活。
del_timer 函数用于删除一个定时器,不管定时器有没有被激活,都可以使用此函数删除。
4、del_timer_sync 函数
int del_timer_sync(struct timer_list *timer)
函数参数和返回值含义如下:
timer:要删除的定时器。
返回值: 0,定时器还没被激活; 1,定时器已经激活。
del_timer_sync 函数是 del_timer 函数的同步版,会等待其他处理器使用完定时器再删除,
5、mod_timer 函数
int mod_timer(struct timer_list *timer, unsigned long expires)
函数参数和返回值含义如下:
timer:要修改超时时间(定时值)的定时器。
expires:修改后的超时时间。
返回值: 0,调用 mod_timer 函数前定时器未被激活; 1,调用 mod_timer 函数前定时器已
被激活
mod_timer 函数用于修改定时值,如果定时器还没有激活的话, mod_timer 函数会激活定时
器,通常使用此函数达到定时器周期循环的目的。
三、内核定时器使用框架
如下图所示是一个周期性定式循环框架。
struct timer_list timer; /* 定义定时器 */
/* 定时器回调函数 */
void function(unsigned long arg){
/*
* 定时器处理代码
*/
/* 如果需要定时器周期性运行的话就使用 mod_timer
* 函数重新设置超时值并且启动定时器。
*/
mod_timer(&dev->timertest, jiffies + msecs_to_jiffies(2000));
}
/* 初始化函数 */
void init(void){
init_timer(&timer); /* 初始化定时器 */
timer.function = function; /* 设置定时处理函数 */
timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间 2 秒 */
timer.data = (unsigned long)&dev; /* 将设备结构体作为参数 */
add_timer(&timer); /* 启动定时器 */
}
/* 退出函数 */
void exit(void){
del_timer(&timer); /* 删除定时器 */
/* 或者使用 */
del_timer_sync(&timer);
}四、定时器实验代码
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define TIMER_COUNT 1
#define TIMER_NAME "timer"
#define CLOSE_CMD _IO(0XEF, 1) /*关闭命令*/
#define OPEN_CMD _IO(0XEF, 2) /*打开命令*/
#define SETPERIOD_CMD _IOW(0XEF, 3, int) /*设置周期命令*/
/*设备结构体*/
struct timer_dev{
dev_t devid; /*设备号*/
int major; /*主设备号*/
int minor; /*次设备号*/
struct cdev cdev; /*字符设备*/
struct class *class; /*创建类*/
struct device *device; /*创建设备*/
struct device_node *node; /*设备节点*/
int led_gpio; /*led号*/
int timerperiod; /*周期时间*/
struct timer_list timer; /*定时器*/
spinlock_t lock; /* 定义自旋锁 */
};
struct timer_dev timer;
static int timer_open(struct inode *inode, struct file *filp){
filp->private_data = &timer; /* 设置私有数据 */
return 0;
}
static long timer_ioctl(struct file *filp,unsigned int cmd, unsigned long arg){
int ret = 0;
int value = 0;
struct timer_dev *dev = (struct timer_dev*)filp->private_data;
switch(cmd) {
case CLOSE_CMD:
del_timer_sync(&dev->timer);
break;
case OPEN_CMD:
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(timer.timerperiod));
break;
case SETPERIOD_CMD:
ret = copy_from_user(&value, (int *)arg, sizeof(int));
if(ret timerperiod = value;
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(timer.timerperiod));
break;
}
return ret;
}
static int timer_release(struct inode *inode, struct file *filp){
return 0;
}
static const struct file_operations timer_fops = { /*字符设备操作函数集合*/
.owner = THIS_MODULE,
.unlocked_ioctl = timer_ioctl,
.open = timer_open,
.release = timer_release,
};
/*定时器超市处理函数*/
static void timer_func(unsigned long arg) {
struct timer_dev *dev = (struct timer_dev*)arg;
static int sta = 1;
unsigned long flags;
sta = !sta;
spin_lock_irqsave(&dev->lock, flags);
gpio_set_value(dev->led_gpio, sta);
spin_unlock_irqrestore(&dev->lock, flags);
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(timer.timerperiod));
}
/*初始化LED灯*/
int led_init(struct timer_dev *dev){
int ret = 0;
/*获取设备节点*/
dev->node = of_find_node_by_path("/gpioled");
if(dev->node == NULL){ /*寻找节点失败*/
ret = -EINVAL;
goto failed_findnode;
}
/*获取led所对应的gpio*/
dev->led_gpio = of_get_named_gpio(dev->node, "led-gpios", 0);
if(dev->led_gpio led_gpio);
/*申请gpio*/
ret = gpio_request(dev->led_gpio, "led-gpios");
if(ret){
printk("Failed to request gpio rn");
ret = -EINVAL;
goto failed_findnode;
}
/*使用IO,申请为输出*/
ret = gpio_direction_output(dev->led_gpio, 1); /*设置为输出,高电平不点亮*/
if(ret led_gpio);
failed_findnode:
device_destroy(dev->class, dev->devid);
return ret;
}
/*入口函数*/
static int __init timer_init(void){
int ret = 0;
/* 初始化自旋锁 */
spin_lock_init(&timer.lock);
/*注册字符设备*/
timer.major = 0; /*内核自动申请设备号*/
if(timer.major){ /*如果定义了设备号*/
timer.devid = MKDEV(timer.major, 0);
ret = register_chrdev_region(timer.devid, TIMER_COUNT, TIMER_NAME);
}
else{ /*否则自动申请设备号*/
ret = alloc_chrdev_region(&timer.devid, 0, TIMER_COUNT, TIMER_NAME);
timer.major = MAJOR(timer.devid); /*保存主设备号*/
timer.minor = MINOR(timer.devid); /*保存次设备号*/
}
if(ret < 0){
goto failed_devid;
}
printk("timerdev major = %d minor = %d rn",timer.major,timer.minor); /*打印主次设备号*/
/*添加字符设备*/
timer.cdev.owner = THIS_MODULE;
cdev_init(&timer.cdev, &timer_fops);
ret = cdev_add(&timer.cdev, timer.devid, TIMER_COUNT);
if(ret < 0){ /*添加字符设备失败*/
goto failed_cdev;
}
/*自动添加设备节点*/
/*创建类*/
timer.class = class_create(THIS_MODULE, TIMER_NAME); /*class_creat(owner,name);*/
if(IS_ERR(timer.class)){ /*判断是否创建类成功*/
ret = PTR_ERR(timer.class);
goto failed_class;
}
/*创建设备*/
timer.device = device_create(timer.class, NULL, timer.devid, NULL, TIMER_NAME);
if(IS_ERR(timer.device)){ /*判断是否创建类成功*/
ret = PTR_ERR(timer.device);
goto failed_device;
}
/*初始化led*/
ret = led_init(&timer);
if(ret < 0){
goto failed_ledinit;
}
/*初始化定时器*/
init_timer(&timer.timer);
timer.timerperiod = 500;
timer.timer.function = timer_func; /*定时器超时处理函数*/
timer.timer.expires = jiffies + msecs_to_jiffies(timer.timerperiod);/*超时时间*/
timer.timer.data = (unsigned long)&timer; /*将指针变量强制转化为unsigned long类型*/
add_timer(&timer.timer); /*添加定时器*/
return 0;
failed_ledinit:
failed_device:
class_destroy(timer.class);
failed_class:
cdev_del(&timer.cdev);
failed_cdev:
unregister_chrdev_region(timer.devid, TIMER_COUNT);
failed_devid:
return ret;
}
/*出口函数*/
static void __exit timer_exit(void){
/*删除定时器*/
del_timer(&timer.timer);
gpio_free(timer.led_gpio);
/*注销字符设备*/
cdev_del(&timer.cdev);
/*卸载设备*/
unregister_chrdev_region(timer.devid, TIMER_COUNT);
device_destroy(timer.class, timer.devid);
class_destroy(timer.class);
}
/*模块入口和出口*/
module_init(timer_init);
module_exit(timer_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ZYC");本文原创地址:https://www.linuxprobe.com/lnhsyqjbljlj.html编辑:刘遄,审核员:暂无